
Известной основой аппаратной поддержки самообучающейся системы управления является ассоциативная вычислительная система (ВС).
Главное отличие ассоциативной ВС от обычной системы последовательной обработки информации состоит в использовании ассоциативной памяти или подобного устройства, а не памяти с адресуемыми ячейками.
Ассоциативная память (АЛ) допускает обращение к данным на основе их признака или ключевого слова: имени, набора характеристик, задания диапазона и т.д.
Распространенный вид АП — таблица с двумя столбцами: "запросное поле — ответное поле". Строка таблицы занимает регистр памяти. Запросные поля обрабатываются по ключевому слову, производится поиск на основе сравнений и выдается результат из одного (или более) ответного поля. При помощи маскирования выделяются только те поля ключевого слова, которые используются в процессе поиска для сравнения.
Типичными операциями сравнения ассоциативной памяти являются следующие: «равно не равно», «ближайшее меньше чем — ближайшее больше чем», «не больше чем — не меньше чем», «максимальная величина — минимальная величина», «между границами — вне границ», «следующая величина больше — следующая величина меньше» и др., т.е. все это — операции отношения и определения принадлежности.
Поскольку ассоциативные ВС характеризуются только активным использованием АП в вычислениях, то в целом они обладают обычными свойствами, производят сложные преобразования данных и принадлежат типу ОКМД (STARAN, РЕРЕ) или МКМД. Для параллельного обращения с целью ускорения поиска АП разбита на модули (в STARAN 32 модуля).
Когда в 1980 г. был провозглашен так называемый японский вызов относительно построения ВС сверхвысокой производительности, то в одном из важнейших пунктов предусматривалась необходимость самого широкого использования принципов самообучающихся систем — систем, способных накапливать опыт и выдавать результат решения задачи без расчетов — на основе ассоциации и интерполяции (экстраполяции). Это значит, что применение ассоциативных ВС неотделимо от проблемы искусственного интеллекта.
Покажем, что ничего существенно нового в практику человеческого мышления ассоциативные машины не вносят, это всего лишь привычный способ использования интерполяционных таблиц, например таблицы логарифмов.
Пусть мы пользуемся значениями функции у =f(x).
Можно запрограммировать ее вычисление на персональном компьютере, и, при необходимости задавая значение х, запускать программу, получая значение у.
Предположим, та же функция довольно сложна, а ее вычисление — важный элемент алгоритма управления в реальном времени. В таком случае зададим эту функцию таблично, а для ускорения выборки включим в ВС ассоциативную память. Предусмотрим операции, позволяющие производить простейшую интерполяцию, а именно для данного значения х найти наибольшее и наименьшее 
![]() > х. Выбрать для них
> х. Выбрать для них 

В жизни очень часто приходится решать трудно формализуемые задачи, подобно предложенной дядей Рамзаем. Но в результате обучения и приобретения опыта складывающиеся в дальнейшем ситуации оцениваются на «похожесть» и принимается решение.
Как, например, определить, на сколько повернуть рулевое колесо, чтобы остаться на дороге? Ведь первый раз мы въезжали в бордюр! Видимо, в нашем сознании постепенно сложилась и зафиксировалась некая таблица.
Пожалуй, наиболее полно и с точки зрения практики решение задачи самообучения представлено в артиллерии, точнее, в правилах стрельбы.
После занятия огневой позиции подготовка установок для ведения огня занимает много времени. На рассчитанных установках по каждой цели производится пристрелка, когда цель захватывается в широкую вилку, затем по наблюдениям вилка «половинится» до тех пор, пока на середине узкой вилки не переходят на поражение. После стрельбы следует замечательная команда «Стой, записать...», по которой наводчик на щите орудия пишет номер цели и пристрелянные по ней установки. Такая работа проделывается и по фиктивным целям — реперам. Постепенно на данной местности запоминаются пристрелянные установки по многим целям и реперам. Тогда подготовка данных по вновь появляющимся целям резко упрощается, так как сводится к переносу огня от ближайшей цели или репера, т.е. к внесению поправок по дальности и направлению. Доказано, что при этом достаточно сразу назначить захват цели в узкую вилку, что сокращает время пристрелки. Правила стрельбы существуют века, однако вряд ли кто то осознавал, что речь идет о реализации самообучающейся системы, аналога которой не существует.
Для трудно формализуемых задач управления или для увеличения производительности вычислительных средств известно так называемое ситуационное управление, предложенное Д.А. Поспеловым. Оно заключается в том, что для каждого значения вектора, характеризующего сложившуюся ситуацию, известно значение вектора, описывающего то решение, которое следует принять. Если все ситуации отразить невозможно, необходимо задать правило интерполяции (аналог интерполяции, обобщенной интерполяции).
Пусть исходная ситуация характеризуется вектором
X — 
![]() ..., ...,
..., ...,
По значению X, т.е. по его компонентам, принимается решение Y, также представляющее собой вектор
Y= {y1, ..., yп}.
Компоненты векторов X и Y могут быть целыми и вещественными числами, а также булевыми. Изначально они даже могут иметь нечисловую природу: «темнее — светлее», «правее — левее», «ласковее — суровее» и т.д. Проблема численной оценки качественных или эмоциональных категорий здесь не рассматривается.
Структура ассоциативной памяти (АП) и общий вид ее обработки показаны на рис. 6.1.
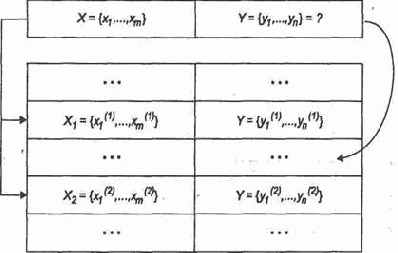
Пусть для входной ситуации X необходимо найти решение Y. В АП находятся два вектора 

![]() и
и 
![]() выполняется условие
выполняется условие 

![]() =
= 

Где 
![]() — расстояния между векторами
— расстояния между векторами 
![]() а также
а также 
Если точность Y достаточна, принципиально возможно дополнение АП новой строкой "X— Y", т.е. информацией о новом опыте.
Впрочем, динамика развития и уточнения АП, как базы знаний, представляется иной. Далеко не всегда целесообразно развивать базу знаний только тогда, когда принято ошибочное решение. «Учение на ошибках» может привести к трагедии (или к срыву процесса управления), особенно на этапе обучения системы.
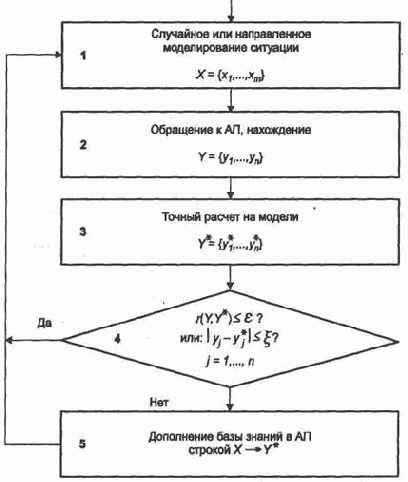
Поэтому обучение системы целесообразно проводить на достаточно точной модели, максимально использующей точные вычисления компонент решения. Модель используется не только на специально предусмотренном этапе обучения системы, но и вне реального цикла управления, т.е. когда система работает в режиме дежурства, параллельно с функциональным контролем. Схема алгоритма работы системы представлена на рис. 6.2.