

Составление расписания — оптимизационная задача (оптимизируются известные технико экономические показатели) значительной трудоемкости, поэтому до сих пор диспетчер фактически работает вручную, хотя существуют некоторые эвристические алгоритмы.
Традиционно расписание движения поездов через перегон, контролируемый одним диспетчером, составляется графически, в виде схемы с подразумеваемой системой координат: горизонтально — время, вертикально — расстояние от одного конечного пункта до другого с указанием промежуточных расстояний. Тогда график движения каждого поезда будет представлен в виде наклонной линии с переменным углом наклона, с учетом остановок. Общий угол наклона линии соответствует направлению движения поезда. Несколько поездов, следующих через перегон, порождают сложную «картинку» их обслуживания согласно приоритетам, возможного схождения путей в один, длины поезда (с учетом длины путей станций), необходимой скорости следования, запретом остановок.
Диспетчер должен умело управлять поездами так, чтобы за время ожиданий одних поездов на пунктах перегона провести другие, выдержав приоритет: скорый, пассажирский, сквозной, сборный и т.д., по возможности избежав столкновений и остановок вне пунктов следования.
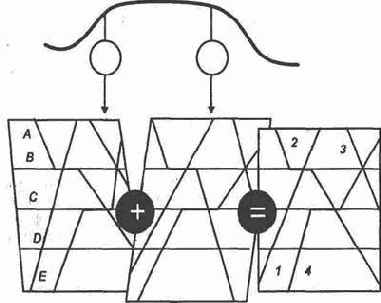
На рис. 9.11 показан график движения поездов на однопутном перегоне. Здесь кривая 1 соответствует скорому поезду, кривые 2 и 3 — двум сквозным поездам, следующим в одном направлении из пункта А. Кривая 4 соответствует сборному поезду, следующему, как и поезд, в противоположном направлении из пункта В.
Существенное Существенное возбуждение возбуждение нейрона первого нейрона второго расписания расписания
Можно представить себе мастерство, интуицию и опыт диспетчера, действительно демонстрирующего искусство!
Мы имеем дело с трудно формализуемой задачей и с необходимостью расширения интеллектуальных возможностей диспетчера. Конструируя нейросеть, необходимо выделить основные события, составляющие исходную ситуацию с четким ответом «да — нет», «10» .
Как автоматизировать решение задачи для каждого конкретного перегона на основе богатого опыта диспетчера эксперта? Прежде всего надо определить понятие «ситуация», выделив и систематизировав все показатели и характеристики: максимальное количество поездов, следующих через перегон в разных направлениях, и допустимые интервалы следования, типы поездов, различные сочетания этих типов, установленные скорости движения и допустимые отклонения, разрешенные остановки, длину состава (при известной длине резервных путей на пунктах перегона). Необходимо разработать способ отображения ситуации на входном слое нейросети.
Далее следует выделить эталонные ситуации и сопоставить им картинки, аналогично приведенным на рис. 9.11, т.е. каждой картинке эталону нужно поставить в соответствие нейрон выходного слоя сети и проложить трассу опорный путь возбуждения от эталона к соответствующему нейрону.
Нейросеть позволит нам перейти от статики экспертной системы (фактически таблицы) к динамике, позволяющей по любой случайной ситуации получать ответ на вопрос: «какая картинка в большей степени соответствует этой ситуации?».
Однако таким образом нельзя исключить аварии, т.е. на этом анализ ситуации не заканчивается. Мы не использовали всю информацию нейросети.
Во первых, сравнение величины возбуждения нейрона выходного слоя (пусть и максимальной) по предъявленной ситуации с величиной возбуждения этого нейрона по эталону может свидетельствовать о достоверности полученного ответа. Если разница лежит в пределах экспериментально установленной точности, то ответ найден. Если же точность недостаточна, то можно построить (автоматически, конечно) приоритетный ряд, выделив нейроны выходного слоя с близкими (ближайшими) величинами возбуждения. Эти величины возбуждения нейронов образуют веса, которые необходимо учесть при использовании картинок, соответствующих этим нейронам.
Во вторых, должна быть решена проблема формирования усредненной картинки по нескольким картинкам с их весами, где основные элементы сместятся в некоторое промежуточное положение. Только тщательное экспериментальное исследование даст ответ на вопрос о возможности и конкретной практической применимости такого решения проблемы.
Например, в исследуемом отрезке времени (см. рис. 9.11) поезд появляется на контролируемом перегоне. Возникают следующие вопросы:
1. Сколько поездов на обслуживании:
n = 1?
n =2 ?
n=n ?
max
2. Каков момент появления поезда:
i = 1?
i = 2?
t=t ?
max
3. Каково направление движения:
от пункта A ?
от пункта B ?
4. Каков тип поезда:
скорый? товарный? и т.д.
И так по всем поездам в планируемом отрезке времени. Таким образом, в зависимости от обстановки, которая ожидается на период планирования, составляется сложная усредненная картинка — график движения.
Однако мы говорим об ассоциативном мышлении, реализуемом нейросетью, о возможности нейросети интерполировать принимаемое решение. Что означает ее ответ: «На 60 из 100 это «картинка» А, но на 30 из 100 «картинка» В, а на 8 из 100 «картинка» С»? Непонятно, но наводит на мысль о возможности автоматического выполнения операций над «картинками». Однако получение «усредненной картинки» должно быть строго обосновано непрерывностью основных параметров, отсутствием скачков. Например, кажущаяся непринципиальной разница в один вагон может привести к тому, что на станции Пырловка поезд не впишется в длину запасного пути.
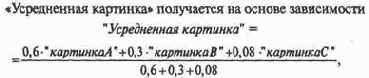
где «+» — условная операция наложения «картинок», а операция «х» использует вес данной «картинки» и определяет долю ее участия в формировании "картинки"результата.
Графически это может означать направление смещения, растяжения и сжатия, в общем, деформации основных общих элементов «картинок» А, В, С для получения результата.
Кстати, на основе такой операции преобразования "картинок" получают среднестатистические образы населения стран и регионов, производят этническое прогнозирование и т.д.
В любом случае работа нейросетевого диспетчера должна сопровождаться работой анимационной модели, наглядно имитирующей движение поездов по сформированному графику и эффектно, в деталях воспроизводящей возможную катастрофу. Модель, в свою очередь, может служить средством обучения нейросети. А потому всегда должно быть предусмотрено, что окончательное принятие решения — за человеком.