
| 
|
|
|
|
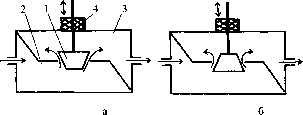
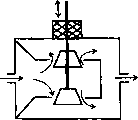
Для проверки элементы устанавливают на плату (рис. 45, а), которую подключают к стенду ЛТ-25.
После настройки сопла закрепляют контргайками.
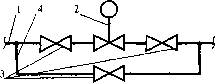
Для проверки элементов I (см. рис. 46) и VI собирают схему (рис.
45, б). Устанавливают давление Р\ на 35 делении шкалы манометра. Давление Рг изменяют до тех пор, пока Рг тоже не начнет изменяться.
При равновесии элемента и Р3, равном 30 40 делениям шкалы манометра, значения Р\ и Рг не должны отличаться между собой более чем на 0,5 деления или на 0,08 кгс/см2.
Элементы I и VI настраивают так же, как элемент IV.
После настройки элементов градуируют органы динамической настройки, т. е. проверяют соответствие фактических значений Ти и 3, нанесенных на шкалы дросселей Ти и а.
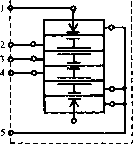
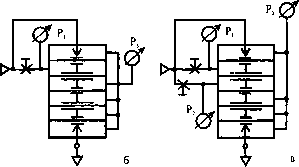
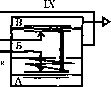
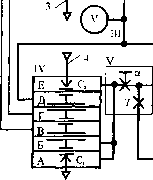
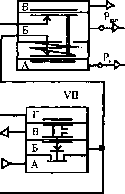
Рис. 46. Принципиальная схема регулятора ПР-3.21 при поверке
Шкалу дросселя а устанавливают на отметку 100%, шкалу Ти 0,05 мин. Для проверки шкалы а используют поверочную схему (см. рис. 44).
Подают давление PJao, равное 35 делениям шкалы манометра. После уравновешивания регулятора на этом значении шкалу дросселя Ти устанавливают на отметку оо, а а на отметку 3000%.
Задатчиком изменяют Р,а„ на величину 20 делений шкалы манометра и фиксируют давление Рвых.
зад
Истинное значение диапазона дросселирования определяют по формуле: ( др
-1
АР
- 100%.
V вых /
Затем шкалу дросселя а устанавливают на следующее оцифрованное значение и расчет повторяют.
Например, уменьшим задание на 20 делений (ДРза0 = 20 делений) при положении дросселя а - 60%. Если при этом Рвых установится на 22-ом делении шкалы манометра, то истинное значение д будет равно
20
13
- 100% = 54%.
Для градуировки дросселя Ти регулятор балансируют при значениях: Рзаа = 35 делений шкалы манометра, д = 100% и Ти = 0,05 мин.
Устанавливают шкалу дросселя а на отметку 3000%, а шкалу Ти на проверяемую отметку. Затем резко увеличивают давление Рза0 на 20 делений и включают секундомер. В момент, когда выходное давление достигнет значения 48 делений, секундомер выключают.
Время достижения Р,ых значения 48 делений и есть истинное время интегрирования регулятора на проверяемой точке.
Данные фактических значений д и Ти на оцифрованных точках шкал заносят в протокол стендовой поверки или в паспорт регулятора в виде таблиц. Если фактически значения д и Ты больше или меньше допустимых, регулируют значения б и Г, специальными регулировочными винтами, расположенными под шкалами дросселей Ти и а .
Для проверки вторичных приборов собирают поверочную схему. На штуцер 4 подают питание Рпп = 1,4 кгс/см2, на штуцер 2 подают Р.. от задатчика стенда, которую контролируют по образцовому манометру. Выходное давление Р€ЫХ со штуцера 7 контролируют также по образцовому манометру.
Для проверки работы задатчика вторичный прибор включают в режиме ручного управления.
При вращении задатчика стрелки вторичного прибора Задание и Выход должны синхронно перемещаться по шкалам и погрешность их показаний, сравниваемых с показаниями образцового манометра, должна быть не более 1%.
Затем проверяют станцию управления вторичного прибора. При нажатой кнопке Вкл нажимают кнопку А, отключая задатчик от выхода прибора, и давление на клемме 3 должно исчезнуть. Давление на клемме 5 есть.
При нажатии кнопки АП должно исчезнуть давление на клемме 5 (показания по шкале Задание становятся равными нулю), тогда вращение задатчика не изменяет положения стрелок Задание и Выход. Если в этом положении подать на штуцер 6 от стенда давление 0,2 ч- 1,0 кгс/см2, то стрелка Задание должна показать это давление и, это же давление должно появиться на клемме 5.
Проверку выполненного монтажа начинают с проверки правильности подключения пневмолинии к штуцерам прибора. Затем проверяют герметичность системы.
Если обнаруживаются негерметичности в пневморазъеме вторичного прибора, резиновые кольца штекеров регулятора покрывают тонким слоем вакуумной смазки или плотнее затягивают винты, которыми регулятор крепится к прибору.
Герметичность линии к исполнительному механизму проверяют следующим образом. Устанавливают Рвых = 0,8ч-1,0 кгс/см2, и после нажатия кнопки А Рвых не должно изменяться.
При опробовании системы проверяют работоспособность регулятора и его фазировку. Для этого к штуцеру 2 подключают ПНП-2 и вторичный прибор включают в автоматический режим (кнопки А и Вкл нажаты). Задатчиком прибора устанавливают Р7ао - 0,6 кгс/см2, при этом Рвых стремится к нулевому или максимальному значению.
Задатчиком ПНП-2 имитируют Р~, равное 0,6 кгс/см2.
При Р~ = Рзад Рвых должно начать изменяться в сторону увеличения или уменьшения.
Для ускорения проверки шкалы дросселей а и Ти следует установить Т„ = 0,05 мин и 5 = (10 -г 40)%.
Правильность фазировки систем проверяют путем логического анализа. Например, если регулируется температура газа изменением подачи охлаждающей воды в теплообменник при помощи клапана ВО, то при увеличении температуры газа выше заданной, должно быть увеличено количество охлаждающей воды.
Для динамической настройки регулятора выбирают один из методов, который с учетом технологических особенностей системы и требований к точности регулирования является наиболее эффективным. Широко применяют для систем пневмоавтоматики метод определения настроек по результатам раскачки объекта регулирования на критической частоте.
Для реализации этого метода совместно с технологическим персоналом составляют программу испытаний, в которой устанавливают величину нагрузки агрегата, допустимую величину возмущения и требования к качеству регулирования.
В качестве примера приведены результаты эксперимента и настройки регулятора уровня. Система построена следующим образом.
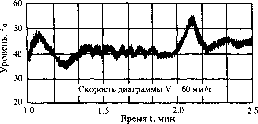
Уровнемер вырабатывает пневматический сигнал, который поступает на вторичный прибор и на регулятор ПР-3.21, управляющий пневматическим исполнительным механизмом МИМ. В режиме Р было установлено значение уровня 40% и на исполнительный механизм, находившийся при стабилизации уровня под давлением 0,55 кгс/см2, подавались ступенчатые изменения d на величину 18 кгс/см2, или 22% от диапазона изменения выходного сигнала 0,8 кгс/см2. Знак возмущения изменяли в момент прохождения уровнем значения 40% и в противофазе с ним.
Как видно из графика, средняя амплитуда колебаний Акр равна примерно 1,2%, а средний период их Тц, = 4 мин.
Для степени затухания хр - 0,9 оптимальные настройки определяют по формулам
А 1 о
= 2 100% =----100% = 12,4%,
0,44 d 22-0,44
Т„ опт = 1,25Г? - 5 = 1,25 - 0,4 - 0,125 = 0,625л,мн.
На шкалах дросселей а и Г, устанавливают д = 10%, 7 = 0,5 мин.
Кривая переходного процесса при ступенчатом изменении (кривая после периодических колебаний) величины задания Регулятору уровня, равного 5% шкалы.
На рис. 47 показана частотная характеристика регулирования уровня жидкости при помощи регулятора ПР-3.21.
Согласно ГОСТ 14691-69 они состоят из исполнительного механизма (ИМ) и регулирующего органа (РО). В соответствии с сигналами, поступающими по командной линии от регулирующего устройства, ИМ создает перестановочное усилие, под действием которого РО изменяет проходное сечение технологического трубопровода на входе в объект регулирования или выходе из него.
Изменение при этом притока (расхода) вещества является регулирующим воздействием, направленным на объект.
По виду используемой для работы энергии ИМ могут быть пневматическими, гидравлическими, электрическими. На технологических установках НПЗ применяют пневматические ИМ, работающие в составе пневматических регуляторов.
Они отличаются видом привода (мембранный или поршневой), характером перемещения выходного элемента (линейное или угловое), величиной перемещения и перестановочного усилия (момента силы).
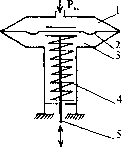
Пружинный мембранный ИМ (рис. 48) по устройству аналогичен приводу П-регулятора прямого действия, рассмотренного ранее.
Воздух от регулирующего устройства поступает в мембранную коробку. Перестановочное усилие, создаваемое вялой мембраной на штоке, пропорционально давлению воздуха и эффективной площади жесткого центра (опоры мембраны).
Обратный ход штока при уменьшении давления обеспечивает возвратная пружина. Величина рабочего хода штока может быть от 5 до 100 мм при изменении давления воздуха от 10 ч-15 до 90 ч-95 кПа.
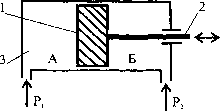
Поршневой ИМ (рис. 49) применяют в тех случаях, когда при достаточном перестановочном усилии требуется значительное перемещение регулирующего органа (до 300 мм). Поршень 1 со штоком 2 неподвижен, если давления воздуха в полостях А и Б цилиндра 3 равны.
Сжатый воздух поступает из золотникового воздухораспределителя (на схеме не показан), управляемого пневмосигналом от регулирующего устройства.
Кроме односедельных РО (рис. 50) применяют двухседельные (рис.
51), имеющие большую пропускную способность.
Они снабжены более мощным приводом и РО специальной конструкции. Устанавливают их последовательно с регулирующими и исполнительными устройствами и при нормальном ходе процесса они полностью открыты.
Перемещению штока в регулирующих ИМ под действием усилий мембраны и возвратной пружины противодействуют силы трения в сальниковом уплотнении, а также динамическое воздействие на затвор потока вещества, проходящего через РО.
Это снижает чувствительность ИМ к малым изменениями давления командного воздуха, затвор перемещается рывками, что, в конечном итоге, отрицательно сказывается на качестве регулирования.
53), позволяющая выключать ИМ (например, для ремонта). Управление расходом вещества в этом случае осуществляется вручную вентилем (задвижкой) на обводной линии.
Регулирующий орган должен устанавливаться с учетом направления потока вещества в трубопроводе (на корпусе РО имеется указательная стрелка). В случае установки ИМ на
линиях с горячими продуктами корпус узла сальника должен иметь ребристый радиатор охлаждения, а для предотвращения застывания вязких продуктов (например, мазута) корпус РО оборудуют обогревательной рубашкой.
8.1. Преобразователи давления и разрежения
Государственной системой приборов (ГСП) разработано три типа унифицированных преобразователей давления: пневмосиловой (рис. 54), электросиловой (рис.
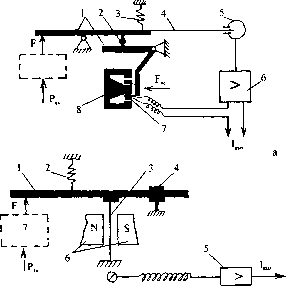
55, а), частотносиловой (рис. 55, б).
Приборы состоят из двух основных элементов: измерительного блока и преобразователя перемещения рычага измерительного блока в выходной стандартный сигнал пневматический, электрический или частотный. Такие преобразователи предназначены для работы в системах автоматического контроля и регулирования давления.
Принцип действия пневмосилового преобразователя заключается в следующем. В измерительном блоке измеряемое давление преобразуется в усилие Р, которое уравновешивается усилием сильфона обратной связи. При изменении давления происходит незначительное перемещение рычага и заслонки. При этом сопло и заслонка преобразуют это перемещение в управляющий сигнал давления сжатого воздуха, поступающего на усилитель.
Выходной пневматический сигнал с усилителя поступает одновременно в линию дистанционной передачи в сильфон обратной связи. Питание усилителя производится сжатым воздухом с давлением 137 кПа (1,4 кгс/см2), а давление выходного сигнала усилителя изменяется в пределах (19,6 -і-98) кПа (0,2-И кгс/см2).
Принцип действия прибора (рис. 54) основан на пневматической силовой компенсации. Измеряемое давление Р, подаваемое в сильфон I, преобразуется на передаточном механизме (Т-образном и Г-образном рычагах 2, 3) в пропорциональное усилие, которое автоматически уравновешивается усилием, развиваемым давлением воздуха в сильфоне обратной связи 9. Усилие, воздействующее на передаточный механизм, вызывает незначительное перемещение заслонки 5 относительно неподвижного сопла 6.
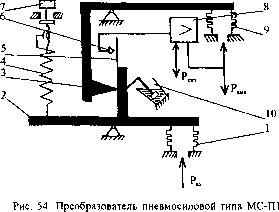
В приборе установлен жидкостный демпфер (успокоитель) 10, устраняющий автоколебания выходного сигнала.
Принцип действия электросилового и частотно-силового преобразователей подобен действию пневмосилового преобразователя.
Так, в электросиловом преобразователе при изменении усилия Р происходит незначительное перемещение рычажной системы 1 и управляющего флажка 4 дифференциальнотрансформаторного индикатора рассогласования 5. При возникновении перемещения флажка в индикаторе генерируется напряжение переменного тока, которое усиливается электронным усилителем 6. Выходной сигнал с усилителя поступает в линию дистанционной передачи и в обмотку 7 электромагнитного устройства 8, являющегося обратной связью,
уравновешивающей входное усилие /V Величина выходного тока преобразователя составляет 05 мА или 020 мА постоянного тока.
Манометр имеет класс точности 1,0.
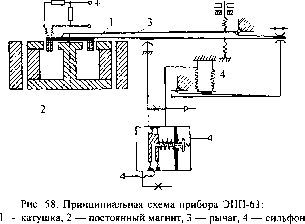
При подаче измеряемого давления во внутреннюю полость манометрической трубки 1 происходит ее деформация, в результате которой поворачивается коромысловое устройство 2. Противоположный конец коромысла представляет собой металлическую площадку (флажок), который находится в высокочастотном поле катушки 3 (L1), входящей в контур генератора, выполненного на транзисторе ?Т1. При перемещении коромысла флажок изменяет свое положение относительно катушки L1, вследствие чего изменяется ее индуктивность и ток базы транзистора ?Т1 и генератора.
При изменении режима генератора изменяется коллекторный ток транзистора ?Т2, что, в свою очередь, приводит к изменению тока базы транзистора ?Т2, а следовательно, изменяется ток выхода преобразователя.
В цепи коллектора транзистора ?Т2 включена катушка обратной связи L3, которая укреплена на коромысле в поле постоянного магнита. Выходной ток транзистора ?Т2, проходя через индуктивность L3, создает момент обратной связи, противоположный моменту, создаваемому при деформации манометрической пружины.
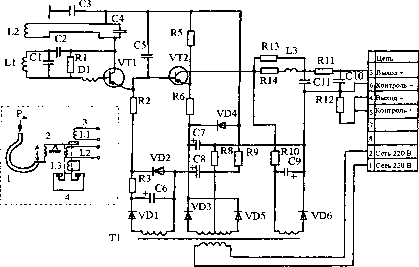
Преобразователь ЭПП-63 может также работать в комплекте с любым пневматическим прибором или устройством, рассчитанным на дистанционный прием входного сигнала унифицированного диапазона.
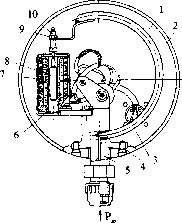
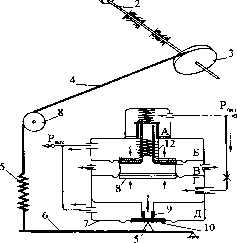
Угловое перемещение сектора 1 посредством оси 2, барабана 3, гибкой ленты 4 преобразуется в пропорциональное усилие пружины 5. Усилие, развиваемое пружиной, через рычаг 6 воздействует на заслонку 10, которая приближается к соплу 9 или отдаляется от него. Это вызывает изменение давления в камере Г и перемещение мембранной сборки 8, что приводит к увеличению или уменьшению давления в камере Б. Изменение давления в камере Б будет продолжаться до наступления нового состояния равновесия.
Давление в камере Б, являющееся выходным давлением, подается в камеру Д, где воздействует на мембрану 7, связанную заслонкой 10 (отрицательная обратная связь).
Давление питающего воздуха 1,4 кгс/см2, погрешность преобразователя не более ±1% от диапазона изменения выходного сигнала, длина трассы выходного сигнала при диаметре трубопровода от 6 мм до 300 мм, расход воздуха не более 2 л/мин. Преобразователь может выпускаться с правым и левым направлением вращения барабана.
Габаритные размеры прибора равны 66x76x105 мм.
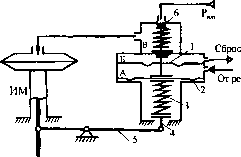
Для обеспечения четкой работы пружинного мембранного ИМ его дополняют усилителем мощности, называемым позиционером (рис. 60). Его работа основана на принципе компенсации сил: на мембранную сборку, образованную мембранами 1 и 2, действуют два усилия, одно из которых создается давлением командного воздуха в камере А и нап-
равлено вниз: снизу вверх действует усилие со стороны пружины 3. Через шток 4 и рычаг 5 его создает ИМ. Воздух в мембранную коробку поступает из камеры В позиционера.
Давление воздуха в ней зависит от положения двойного золотника 6. Верхняя часть его управляет впуском воздуха из линии питания, а нижняя сбросом его через камеру Б в атмосферу. Это давление изменяется до тех пор, пока ИМ не отработает требуемое перемещение затвора РО только в этом случае восстановится равновесие мембранной сборки.
Преимущество гидроавтоматики в том, что устройства, использующие энергию, передаваемую по средствам жидкости, способны развивать большие усилия. Поэтому она используется чаще всего в автономных, агрегатных системах в качестве силового управления узлов и механизмов машин, поточных линий, например: применяется на линиях разделки хлыстов в лесной промышленности, в автотракторной технике и пр.
10.1. Гидропривод
Под гидроприводом понимается гидросистема (система гидромашин и гидроагрегатов), служащая для передачи посредством жидкости энергии на расстояние, преобразования ее в механическую энергию на выходе системы (в энергию движения гидродвигателя) и одновременно выполняющая функции регулирования и реверсирования скорости выходного звена.