
| 
|
|
|
|
сигнал на выполнение следующего шага поступает только после того, как давление в определенном месте системы достигает заданного значения.
Рассмотренные выше пневматические элементы могут объединяться в различные блоки, свойства и конструктивные особенности которых определяются применяемыми клапанами. Такие блоки называют комбинированными клапанами.
Их условные графические обозначения представляют собой также комбинации обозначений входящих в них элементов, соединенных друг с другом соответствующим образом. К комбинированным клапанам относятся:
Клапаны выдержки времени (таймеры)
- клапаны выдержки времени: задержка пневматических сигналов,
- пневмоблоки управления: генерация сигналов для реализации реверсивных и циклических движений цилиндров двустороннего действия,
- 5/4-распределители: устройство управления цилиндром двустороннего действия,
- 8-линейные распределители с пневмоуправлением: управление тактовым устройством,
- тактовые генераторы: мультивибраторы для управления быстрым движением цилиндров,
- вакуумные головки с выбрасывателем: для захвата и отпускания деталей,
- тактовые цепочки: для реализации задач управления,
- командные модули с памятью: для пуска при определенных входных условиях.
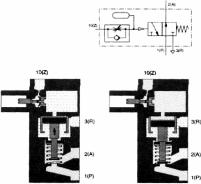
Клапан выдержки времени состоит из 3/2-распределителя, дросселя с обратным клапаном и небольшой пневмоемкости. 3/2-распределитель может быть нормально открытым или нормально закрытым.
Обычно выпускаются клапаны выдержки времени в обоих вариантах исполнения с диапазоном выдержки времени 0...30 секунд.
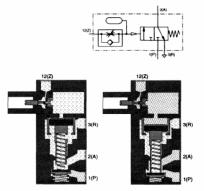
После достижения в емкости заданного значения давления запорный орган 3/2-распределителя перемещается вниз. При этом блокируется проход от выхода 2(A) к выхлопному отверстию 3(R), a затем открывается проход от канала питания 1(Р) к выходу 2(A).
Время, необходимое для наполнения пневмоемкости сжатым воздухом до заданного значения давления, и является временем настройки данного устройства.
Чтобы переключить клапан выдержки времени в исходное положение, необходимо снять сигнал со входа 12(Z). Воздух из емкости через обратный клапан быстро вытечет в атмосферу, и 3/2-распределитель под действием пружины вернется в исходное положение, блокируя канал питания 1 (Р) и соединяя выход 2(A) с выхлопом 3(R).
В результате выходной сигнал будет отключен через установленное время.
Время выдержки соответствует моменту достижения определенного уровня давления в пневмоемкости.
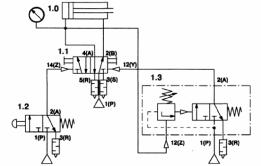
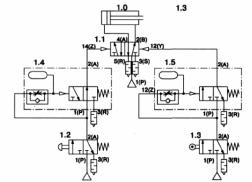
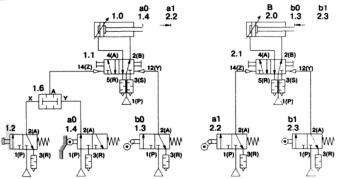
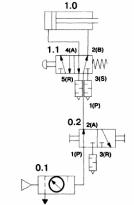
В изучаемой принципиальной схеме используются нормально открытый 1.4 и нормально закрытый 1.5 клапаны выдержки времени. При нажатии на кнопку 1.2 сигнал проходит через клапан 1.4 и, переключая распределитель 1.1, заставляет шток цилиндра выдвигаться.
Клапан имеет настройку времени 0,5 секунды. Этого достаточно, чтобы стартовый сигнал поступил на вход 14(Z) распределителя 1.1. Но спустя 0,5 секунды клапан выдержки времени 1.4, на вход 10(Z) которого также поступает стартовый сигнал от кнопки 1.2, выключается и снимает сигнал со входа 14(Z) распределителя 1.1.
Однако распределитель 1.1 остается в положении, соответствующем выдвижению штока цилиндра 1.0. В крайнем выдвинутом положении шток цилиндра 1.0 нажимает на концевой выключатель 1.3, который посылает сигнал на вход 12(Z) нормально закрытого клапана выдержки времени 1.5. Через установленное время, определяемое настройкой дросселя в клапане
1.5, на выходе 2(A) клапана 1.5 появляется сигнал. Этот сигнал поступает на вход 12(Y) распределителя 1.1, который переключается в исходное положение, поскольку на его противоположном входе 14(Z) сигнала уже нет. Шток цилиндра втягивается.
Новый цикл можно будет начинать, если кнопка 1.2 отпущена. После отпускания кнопки сигнал на входе 10(Z) клапана выдержки времени 1.4 пропадает и клапан 1.4 возвращается в исходную позицию, подготовив линию для подачи нового сигнала на вход 14(Z) распределителя 1.1.
При выборе источника энергии для питания управляющей и исполнительной частей системы управления учитываются:
- требования к исполнительным и выходным устройствам,
- метод управления,
- наличие необходимых для реализации проекта человеческих и производственных ресурсов,
- совместимость проектируемой системы с другими системами, связанными с ней.
В первую очередь должны быть рассмотрены все преимущества и недостатки того или иного вида энергии, который планируется применить в исполнительной и управляющей частях системы. Затем осуществляется выбор решения.
Системы управления можно классифицировать по различным признакам. Ниже представлены виды управления по DIN 19226. В зависимости от постановки задачи может быть выбран один из трех видов управления (рис.6.1).
Если предполагается применение программного управления, то имеется возможность выбора одного из трех его подвидов.
Виды управления по DIN 19226 Следящее управление.
Такое управление, при котором между входной (задающей) и выходной величинами устанавливается однозначная взаимосвязь, а внешние возмущающие переменные не должны вызывать недопустимых отклонений. Следящая система не имеет свойств памяти.
Управление с запоминанием.
При таком управлении после снятия или нового введения задающей величины, в особенности после отработки рассогласования, выходная величина сохраняет (запоминает) достигнутое значение. Для того, чтобы выходную величину вновь привести к начальному уровню, необходимо ввести входной сигнал противоположного знака.
Программное управление.
Известно три подвида программного управления.
- Управление по перемещению.
При управлении по перемещению сигнал управления подается от программного устройства, выходные величины которого зависят от перемещения или положения подвижных частей управляемой установки.
- Последовательное управление.
В такой системе программа последовательного выполнения действий хранится в генераторе программы, который осуществляет ее пошаговое выполнение в соответствии с состоянием управляемой системы. Эта программа может или непрерывно вводиться или же считываться с перфокарт, магнитных лент или других элементов хранения информации.
- Управление по времени.
При управлении по времени задающие величины поступают от программного устройства, оснащенного генератором времени. Таким образом, характерным признаком системы управления по времени является генерация задаваемых программным устройством управляющих воздействий во времени. В качестве генератора программы может использоваться:
- кулачковый вал,
- копир,
- перфокарта,
- перфолента,
- электронные контроллеры.
В следующем разделе представлены выдержки из предварительного стандарта DIN 19237 (издание 1980 года). Во введении к предварительному стандарту DIN 19237 имеются ссылки на еще действующий стандарт DIN 19226. Однако сравнение обоих стандартов указывает на их разногласия.
Желательно, чтобы читатель сам провел сравнение этих документов.
Как уже отмечалось выше, системы управления классифицируют по различным признакам. Так в DIN 19237 также представлено несколько видов управления, которые отличаются по форме представления информации и по видам ее обработки.
Аналоговое управление.
При этом виде управления обрабатываются аналоговые сигналы. Их обработка осуществляется непрерывно функциональными элементами системы.
Цифровое (дискретное) управление.
При этом виде управления обрабатываются цифровые сигналы. Информация представляется в цифровой форме.
Функциональными элементами являются счетчики, регистры, ячейки памяти, счетные устройства и т.д.
Двоичное управление.
При этом виде управления обрабатываются двоичные сигналы, которые не являются составной частью информации, представленной в цифровой форме.
Виды обработки сигналов Синхронное управление.
Управление, при котором обработка сигналов синхронизированна с тактовым импульсом.
Асинхронное управление.
Управление, осуществляемое без тактовых импульсов, при котором изменение выходных сигналов происходит только за счет переключения входных сигналов.
Логическое управление.
Управление, при котором поле значений входных сигналов формирует определенное поле значений выходных сигналов на основе связей, выражаемых в терминах Булевой алгебры. Прежние названия, например: параллельное управление, следящее управление или блокировочное управление, в стандарте DIN 19237 не упоминаются.

Такие прежние названия, как программное управление или тактовое управление, в стандарте DIN 19237 не упоминаются.
Последовательное управление подразделяется на две подгруппы.
- Последовательное управление по времени.
Управление, при котором условия переключения зависят только от времени.
Для осуществления этого вида управления используются реле времени, счетчики времени или задающие валы с постоянным числом оборотов.
Понятие Схемы с управлением по времени по DIN 19226 заменяется понятием Формирование входной величины в зависимости от времени.
- Последовательное управление по состоянию процесса. Последовательное управление, при котором условие дальнейшего переключения зависит только от сигналов, поступающих от управляемой системы.
Понятие Схемы с управлением по перемещению по DIN 19226 - тоже самое, что последовательное управление по состоянию процесса, при котором условие дальнейшего переключения зависит только от сигнала о перемещении объекта управления.
При разработке систем управления необходима четкая постановка задачи. Известно несколько способов представления задачи в описательной или графической форме. Системы управления должны быть снабжены следующей документацией:
- эскиз объекта управления,
- диаграмма перемещение-шаг,
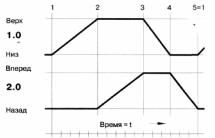
- диаграмма перемещение-время,
- диаграмма управления,
- диаграмма функционирования,
- функциональная схема,
- принципиальная схема.
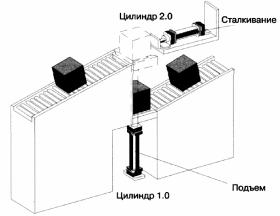
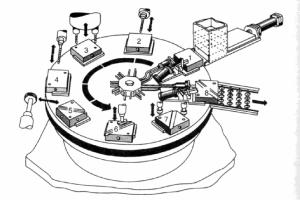
Эскиз объекта управления
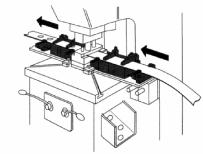
Эскиз объекта управления дает представление о пространственном расположении исполнительных устройств на установке, работой которой управляет пневматическая система. Обычно эскиз изображается не в масштабе и не очень подробно, но ориентация исполнительных устройств показывается правильно.
Эскиз сопровождается описанием работы установки (машины) и диаграммой движения исполнительных устройств.
На ней представляется зависимость пути от шага.
Если система состоит из нескольких исполнительных устройств, то их перемещения изображаются на диаграмме одно под другим. Сравнивая положение отдельных исполнительных устройств на каждом шаге, можно установить взаимосвязь между их положением
.
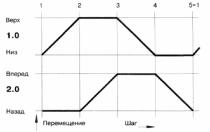
На шаге 3 шток цилиндра 1.0 втягивается, а на шаге 4 втягивается шток цилиндра 2.0. Шаг 5 эквивалентен шагу 1.
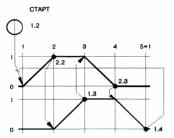
По диаграмме перемещение-время устанавливается зависимость пути от времени.
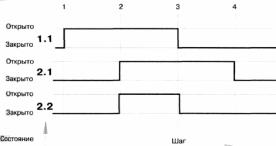
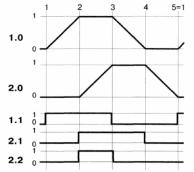
Стрелки на линии сигналов обозначают направление действия сигнала управления.
Изменение состояния системы может произойти только в том случае, если будут приложены все входные сигналы.
Когда цилиндр 1.0 втянется, то включится концевой выключатель 2.3 и начнет втягиваться цилиндр 2.0. Когда шток цилиндра 2.0 втянется, то включится концевой выключатель 1.4, т.е. система вернется в исходное положение.
Краткий способ описания процесса
Краткий способ описания процесса дает представление о процессе движения. В этом случае применяются обозначения движения штоков цилиндров А, В и т.д. Процесс выдвижения обозначается знаком +, а втягивания - знаком -.
Процесс А+ В+ В- А- означает: цилиндр А выдвигается, цилиндр В
выдвигается, цилиндр В втягивается, цилиндр А втягивается, т.е. следующие друг за другом
движения описываются последовательно друг за другом.
Процесс А+В+В- А- означает: цилиндр А выдвигается, цилиндр В
выдвигается и цилиндр А втягивается, цилиндр В втягивается. Одновременно происходящие
движения изображаются один под другим.
При кратком способе описания концевые выключатели обозначаются теми же буквами, что и цилиндры, с которыми они связаны, но маленькими (строчными) буквами. При этом индекс О присваивается позиции втянуто, а индекс 1- позиции выдвинуто.
Функциональная схема
Функциональная схема дает ясную картину взаимодействия и последовательности выполнения команд в пневматической системе. На приведенной ниже функциональной схеме автоматической лепки
Рис. 6.12. Функциональная схема: клепка лен следующий процесс: зажимной цилиндр А выдвигается (А+) и включается концевой выключатель а1.
Сигнал а1 вызывает выдвижение (В+) цилиндра В, т.е. процесс клепки завершается. Выдвигающийся шток клепочного цилиндра В включает концевой выключатель b1, который подает сигнал на втягивание клепочного цилиндра (В-). Теперь срабатывает концевой выключатель b0, который освобождает деталь от фиксации и вызывает втягивание (А-) цилиндра А. Когда цилиндр А полностью втянется, включится концевой выключатель а0.
Сигнал а0 служит предпосылкой начала повторного рабочего цикла.
Принципиальная схема
Принципиальная схема показывает взаимосвязь между элементами системы управления и последовательность прохождения сигналов управления. Принципиальная схема не дает представления ни о физических, ни о механических аспектах процесса управления.
Принципиальная схема всегда показывает направление потоков энергии, которые должны быть направлены на схеме снизу вверх. На различных по высоте чертежа уровнях схемы изображаются источники энергии, информационные, логико-вычислительные, управляющие и исполнительные элементы.
Положение концевых выключателей показывается рядом с исполнительными элементами. Элементы обозначаются в соответствии с нумерацией цепей управления системы, а трубопроводы - по номерам присоединительных каналов элементов.
Эти обозначения делают читаемой принципиальную схему системы управления и позволяют легко заказывать элементы.
Важным элементом передачи сигнала от процессора к исполнительному устройству с поступательным или вращательным движением выходного звена является распределитель. Выбор размеров и типа распределителя влияет на большинство выходных характеристик привода. Совершенствование распределителей осуществляется по следующим направлениям:
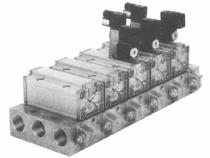
- блочный монтаж с общим подводом питания и выхлопом;
- снижение потерь энергии за счет применения распределителей непрямого действия (с пилотными клапанами);
- многофункциональные распределители, изменение свойств которых осуществляется за счет применения различных вариантов шайб и уплотнений;
- замена традиционных материалов на пластмассы и широкое применение штамповки;
- интеграция нескольких распределителей в один функциональный блок (тактовые цепочки);
- монтаж распределителя на цилиндре.
Установленные на коллекторе распределители используют общий подвод питания (в центре) и общий выхлоп (по бокам). Если требуется, то выхлопные тракты с помощью трубопроводов могут быть отведены в любое место и снабжены индивидуальными или общими глушителями.
Компактная и прочная конструкция коллекторов отвечает идее создания локальных постов управления.
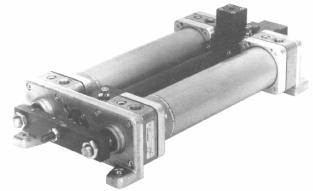
В пневмоавтоматике под термином специальные устройства (блоки управления) понимается комбинация исполнительных и управляющих элементов в едином конструктивном блоке. Простейшим примером блока управления может служить комбинация цилиндра и распределителя. Для приведения такого блока в действие после монтажа необходима только подача сжатого воздуха под давлением. В зависимости от решаемой задачи в блок могут входить цилиндры и распределители различных типов.
Такое устройство, имея согласованные друг с другом составные части, является линейным приводом, готовым к эксплуатации после установки на объекте управления.
Поворотный стол
В некоторых производственных процессах необходимо обеспечить движение рабочего органа по окружности с рядом фиксированных значений угла поворота. Для этих целей используются поворотные столы с фиксацией промежуточных положений.
Исполнительным элементом такого устройства служит пневматический цилиндр, который получает сигнал от пневматического блока управления.
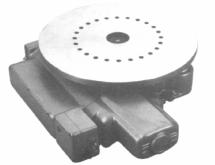
Скорость и величина подачи, а также усилие зажима и усилие подачи могут настраиваться.

Как только появляется сигнал, движение подающего устройства ускоряется. Ускорение возможно и в противоположном направлении движения.
В этой части приведены решения к упражнениям из главы 5 части А. Постановка задачи. Упражнение 1. Прямое управление цилиндром двустороннего действия Шток цилиндра двустороннего действия выдвигается при нажатии пневмокнопки. При отпускании кнопки шток втягивается.
Цилиндр имеет небольшой диаметр поршня (25 мм) и для работы на требуемой скорости потребляет небольшой расход воздуха.
При этом вытесняемый из штоковой полости воздух через каналы 2(B) и 3(S) вытекает в атмосферу. При отпускании кнопки распределителя 1.1 пружина возвращает его в исходное положение, при котором питание поступает на выход 2(B),
А выход 4(A) через канал 5(R) сообщается с атмосферой.